
Published: 7 April 2021
General aspects
In PLAXIS 2D and 3D, providing that the dynamic module is available, a dynamic (i.e., time-dependent) load can be defined by assigning a dynamic multiplier to the dynamic component of a load. As detailed later, the dynamic component of a given load is independent of its static component.
Definition of a dynamic multiplier
A dynamic multiplier can be created either in Structures mode or Staged construction mode, by using one of the following strategies:
- Right-click (RMB) on Dynamic multipliers subtree from Attribute library of the Model explorer, as illustrated in the figure below:

- In the Structures mode, select the Show dynamic multipliers option from the Structures menu; similarly, in Staged construction mode, select the Show dynamic multipliers option from the Phases menu, as illustrated in the figure below:

- Select any load and, subsequently, click on add ( + ) button associated with a given multiplier under the dynamic component subtree of the selected load, as illustrated in the figure below:

A dynamic multiplier can be defined by a harmonic function or by a table of values. For further details on this aspect, please refer to the Reference manual.
Activation of a dynamic load
To apply a dynamic load in a given dynamic phase, the following conditions should be met:
- the dynamic (i.e., time-dependent) component of a given load should be activated;
- a non-zero value should be assigned to the reference value of the dynamic component of the load, qx,start,ref or/and qy,start,ref (or/and qz,start,ref, in PLAXIS 3D);
- a dynamic multiplier should be assigned to the dynamic component of the load.
These aspects are illustrated in the figure below for a dynamic load applied in the y-direction in PLAXIS 2D. Please note that, when applying a dynamic load characterised by more than a single cartesian component, the conditions listed above should be met for all components of the load.

Static and dynamic components of a load
The static component of a given load is independent of its dynamic component. This means that, when both components are active for a given load (e.g., line load, as shown in the figure below), the total load applied to the model is given by the sum of its static (i.e., time-constant) and dynamic (i.e., time-dependent) components. This allows for the application of a different type of loads at a given location. For instance, it is possible to apply the self-weight of a given equipment by using a static load and the vibrations induced by that equipment by using a dynamic load, as exemplified in the Tutorial manual: Dynamic analysis of a generator on an elastic foundation.
Please note that, in the drawing area, the static component of the load is presented in blue, while the dynamic component of the load is presented in green. To ease their visualisation, the toggle corresponding to each one of these components may be activated/deactivated in the Selection explorer. For instance, in the figure below, the visualisation toggle of the load’s static component is deactivated, allowing for the visualisation of the load’s dynamic component (in green).


Time evolution of dynamic loading
When a dynamic load is activated in a given dynamic phase, the value of each of its components (e.g., along y-direction) at each instant of dynamic time, t, is given by:
qy(t) = qy,start,ref x multipliery(t)
where qy,start,ref is the reference value of the dynamic component of the load and multipliery(t) is the time-dependent multiplier of the load, defined by a harmonic function or table of values, as mentioned before.
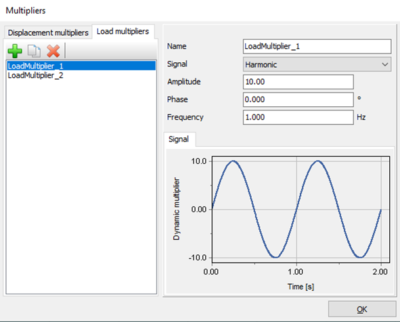
For instance, assuming that, in a 2D analysis, a given y-component of a dynamic load would be defined by a reference value, qy,start,ref, of -2.0 kN/m/m, as well as by a harmonic multiplier characterised by an amplitude of 10.0 kN/m/m, a frequency of 1.0 Hz and a null phase (as shown in the figure below), the dynamic load applied to the model at 0.25 s would be equal to:
qy (t = 0.25 s) = -2.0 x 10.0 x sin(2 p x 0.25) = -2.0 x 10.0 = -20.0 kN/m/m.
Supposing now that a static loading would also be applied in the y-direction with a uniform distribution and qy,start,ref = -8.0 kN/m/m, the total load applied to the model at 0.25 s would consits of the sum of the static and dynamic values:
qy (t = 0.25 s) = -8.0 – 2.0 x 10.0 x sin(2 p x 0.25) = -28.0 kN/m/m.
Source: Bentley Communities
Categories
Finite Element / Finite Difference
Keywords
PLAXIS, PLAXIS3D, PLAXIS2D
Form
Looking for more information? Fill in the form and we will contact Bentley Systems for you. Alternatively, you can visit Bentley's website and speak with a Bentley Geotechnical Expert.